
廣度優先搜尋(BFS)演算法是一種圖形搜尋演算法。從給定的一個點開始,它會先探索該點所有的相鄰點。再來,依序探索這些相鄰點的相鄰點。這樣子一層一層地探索下去,直到找到結果,或是探索完所有的點。
演算法
BFS 演算法需要兩個資料結構。一個叫 visited,用來記錄點是否已經探索過,而另外一個是 queue。當探索到某個點時,它會將相鄰點一一加入到 queue 裡。然後,每一次都會從 queue 中取出最先加入的點來探索。
Algorithm BFS(v) {
queue := Queue();
queue.enqueue(v);
visited[v] := true;
while queue.isNotEmpty {
u := queue.dequeue();
for all edges (u, w) {
if !visited[w] {
queue.add(w);
visited[w] := true;
}
}
}
}時間與空間複雜度
BFS 會從 queue 中取出點,而每個點最多只會被加入到 queue 一次,此時間複雜度是 O(V)。然後,它會掃描每個點的所有相鄰點一次,此時間複雜度是 O(E)。所以,BFS 的總時間複雜度是 O(V + E)。
BFS 需要一個資料結構來記錄點是否已經探索過,所以空間是雜度是 O(V)。BFS 還需要一個 queue,而每個點只會被加入一次。在最壞的情況下,除了目前正在探索的點外,所有的點都在 queue,所以空間複雜度是 O(V)。所以,BFS 的總空間複雜度是 O(V)。
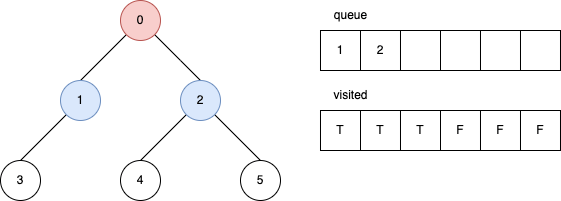
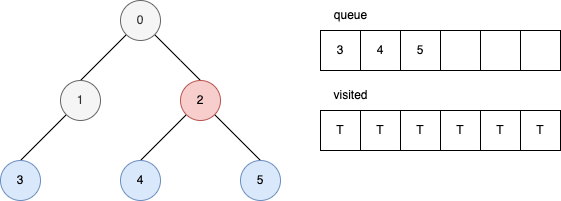
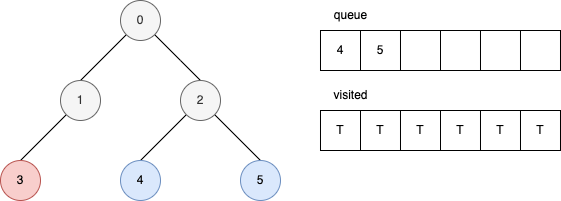
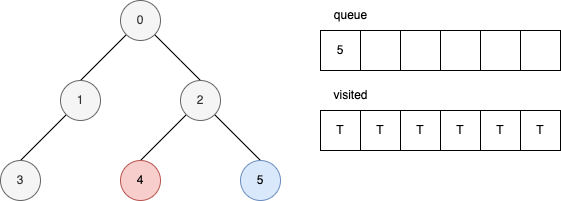
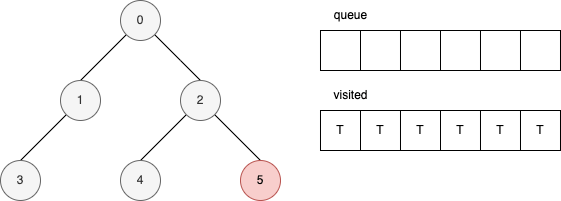
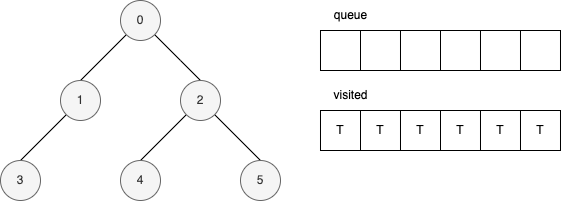
範例
下面的範例顯示,在每一個步驟時,queue 和 visited 內部的變化。



參考
- Ellis Horowitz, Sartaj Sahni, Sanguthevar Rajasekaran, Computer Algorithm.
- Breadth-first search, Wikipedia.









